Atlas
The Aerium Atlas is a high-precision, multi-band RTK GNSS receiver designed for unmanned applications requiring centimeter-level accuracy and robust multi-constellation support. It features the u-blox NEO-F9P chipset and a built-in active ceramic antenna, offering professional-grade positioning performance in a compact form factor.



General
- RTK-capable, high-precision GNSS receiver with active antenna.
- Integrated SAW and LNA filters for signal reliability.
- Compact design ideal for space-constrained unmanned systems.
Compatibility
- GNSS Receiver: u-blox NEO-F9P
- Compatible with:
- Pixhawk and other Ardupilot/PX4-based autopilots
- Connects via standard JST-GH interface
- Supports RTK correction via UART or I²C
- Multi-constellation GNSS support:
- GPS, Galileo, GLONASS, BeiDou
Resources
Mechanical
- Dimensions: 38 mm × 38 mm
- Mounting holes: M3, spaced 30.5 mm × 30.5 mm
- Weight: ~12 g

Electrical
General
- Input voltage: 3.3 – 12 V
- Logic level: 3.3 V
- PPS (Pulse Per Second) output supported
- Integrated battery for fast TTFF (Time To First Fix)
- Top View
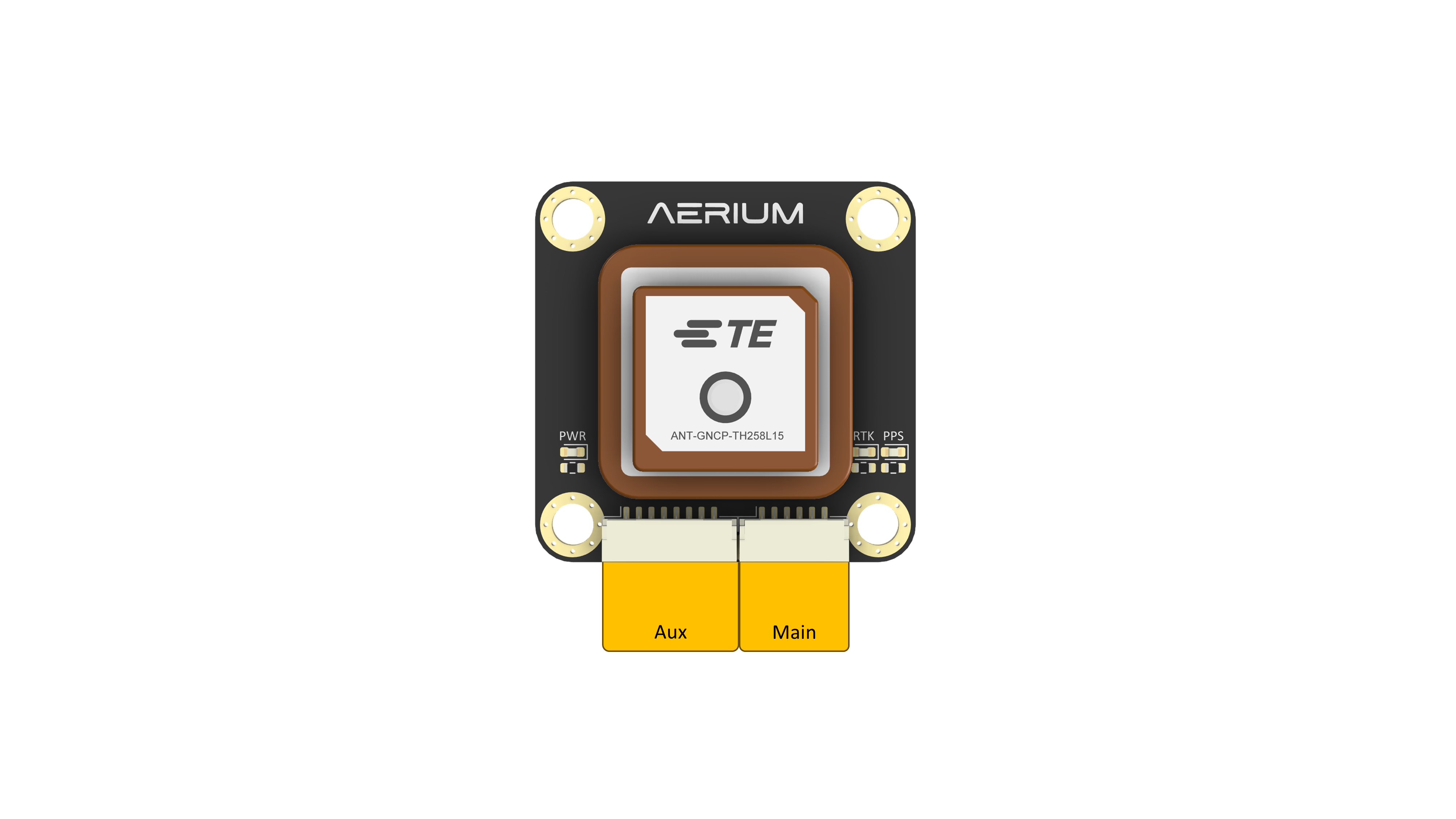
Pinout
Main Connector

-
Connector Definition
Type Part Number Part Name Board Connector SM06B-GHS-TB JST-GH Cable Connector GHR-06V-S JST-GH Pin Name Description Voltage 1 VCC Power Input 3.3V - 12V 2 RX UART receive 3.3 V 3 TX UART transmit 3.3 V 4 SCL I²C clock 3.3 V 5 SDA I²C data 3.3 V 6 GND Ground GND
Aux Connector

-
Connector Definition
Type Part Number Part Name Board Connector SM08B-GHS-TB JST-GH Cable Connector GHR-08V-S JST-GH Pin Name Description Voltage 1 VBUS Power Input 3.3V - 12V 2 D- USB data minus 0V - 3.3V 3 D+ USB data plus 0V - 3.3V 4 RX2 UART2 receive 3.3 V 5 TX2 UART2 transmit 3.3 V 6 PPS Pulse-per-second output 3.3 V 7 INT Interrupt / Data Ready 3.3 V 8 GND Ground GND
Software
Configuration Steps
- Default protocol: UBX over UART or USB
- Configurable using u-blox u-center software
- Supports:
- RTK positioning (Base/Rover mode)
- GNSS constellation selection
- NMEA/UBX message configuration
- Output rate and dynamic model tuning
- Spoofing/jamming detection
Integration Steps
- Connect VCC (3.3 – 12 V) and GND to your power source.
- Connect UART or I²C lines to your autopilot or telemetry system.
- For RTK: connect to RTK correction source via UART or telemetry radio.
- Mount securely to the frame using M3 bolts and spacers.
- Configure using u-center or your autopilot’s GPS driver.